Introduction of Time Synchronous Averaging
Download PDF | © Copyright Crystal Instruments 2016, All Rights Reserved.
“Time Synchronous Averaging” was discussed earlier as a method of background noise reduction in spectra of complex signals. Now, we will look at it as a means of greatly increasing the information we can extract from the time-domain vibration waveform.
TSA is a fundamentally different process than the usual spectrum averaging that is generally done in FFT analysis. It is used to greatly reduce the effects of unwanted noise in the measurement. The waveform itself is averaged in a time buffer before the FFT is calculated, and the sampling of the signal is initiated by a trigger pulse input to the analyzer. If the trigger pulse is synchronized with the repetition rate of the signal in question, the averaging process will gradually eliminate the random noise because it is not synchronized with the trigger. However, the signal that is synchronous with the trigger will be emphasized, as shown below:
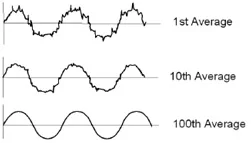
When you do time domain averaging on the vibration signal from a real machine, the averaged time record gradually accumulates those portions of the signal that are synchronized with the trigger, and other parts of the signal, such as noise and any other components such as other rotating parts of the machine, etc., are effectively averaged out. This is the only type of averaging that actually does reduce noise.
Another important application of time synchronous averaging is in the waveform analysis of machine vibration, especially in the case of gear drives. In this case, the trigger is derived from a tachometer that provides one pulse per revolution of a gear in a machine. This way, the time samples are synchronized in that they all begin at the same exact point in the angular position of the gear. After performing an enough number of averages, spectrum peaks that are harmonics of RPM will remain when non-synchronous peaks will be averaged out from the spectrum.
Consider a gearbox containing a pinion with 13 teeth and a driven gear with 31 teeth. If a tachometer is connected to the pinion shaft, and its output is used to trigger an analyzer capable of time synchronous averaging, the averaged waveform will gradually exclude vibration components from everything except the events related to the pinion revolution. Any vibration caused by the driven gear will be averaged out, and the resulting waveform will show the vibration caused by each individual tooth on the pinion.

Credit: Glenn White, Azima/DLI Engineering
Note that in the figure above, the lower averaged waveform indicates one damaged tooth on the pinion.
Required Software Options
Time synchronous average (TSA) is currently implemented in Dynamic Signal Analysis (DSA) mode and will be available in Route and OnSite Mode mode in a short time.
In DSA mode, time synchronous averaging is available for the following spectra: auto power spectrum (APS), cross power spectrum (CPS), frequency response function (FRF), coherence (COH), and octave spectrum (OCT).
Octave spectrum requires acoustic analysis software package and the other spectra are already included in basic software option.
Algorithm
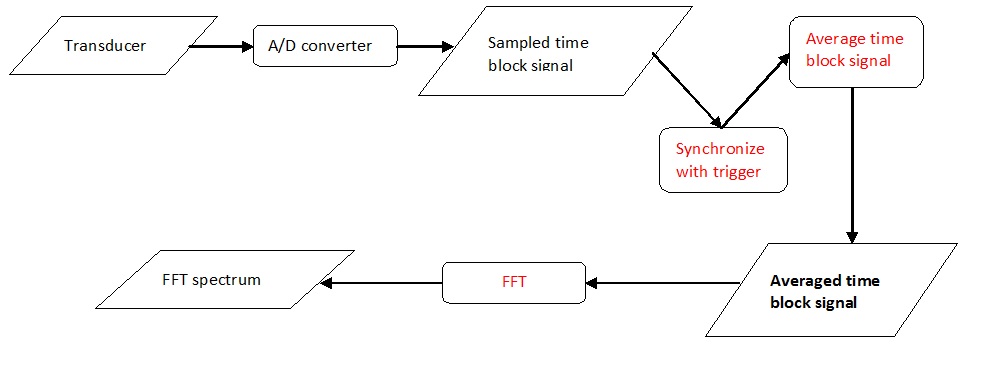
Simplified exponential/linear average block diagram is shown below,

The simplified time synchronous exponential/linear average block diagram is shown below,
CoCo offers two kinds of time synchronous average: time synchronous linear average and time synchronous exponential average.
For time synchronous linear average: spectrum will stop updating when the average number is reached.
Tn = nth frame of the time block signal
An = nth average of the time block signal
N = average number given
For n = 1~N, A1 = T1.
An = (An-1 *(n-1) + Tn)/n
nth frame of the spectrum is calculated from An.
When the average number N is reached, the averaged time block signal is
AN = (AN-1 *(N-1) + TN )/N = (A1 + A2 + A3 + … AN-1 + AN )/N
The averaged spectrum is calculated from AN.
For time synchronous exponential average: spectrum keeps updating and never stops.
α = 1/N = inverse of the average number N
Tcur = current frame of the time block signal
Acur = current average of the time block signal
Apre = previous average of the time block signal
The averaged time block signal is Acur = (1- α)*Apre + α * Tcur
The averaged spectrum is calculated from Acur.
Setup Time Synchronous Average
An APS csa includes APS spectra, a FRF csa could include FRF, COH, CPS, and APS spectra, and an OCT csa includes octave spectra.
When CoCo is analyzing one of the TSA supported spectra, please go to F2: Param --> Analysis Parameters --> Average mode.


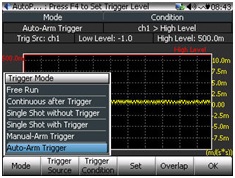
Setup Trigger
Please check “CoCo80 Basic User Manual.pdf” on your EDM CD or the hammer test example on the page of technical support of supporting site. The two documents gives details to help you setup trigger.
Manual-arm trigger and auto-arm trigger modes are suitable for time synchronous averaging.
Results
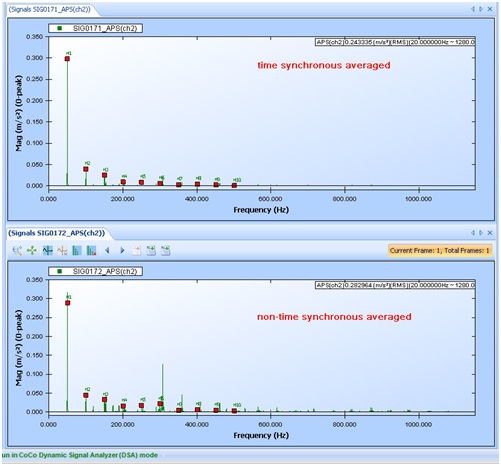
Compare spectrum results of exponential average with time synchronous exponential average.

With exponential average applied to the spectrum, noise floor is higher and there are some noise pikes at high frequencies.

With time synchronous exponential average, noise floor is lower and frequencies other than trigger frequency and its harmonics are eliminated during the average process.
From the figure below, red squares are harmonic cursors.
With time synchronous averaging, only harmonic peaks exist in the spectrum and non-harmonic peaks are averaged out.