Transient Time History Control
Single Axis Shaker Vibration Testing
Generate or import transient time waveforms into EDM VCS for replication onto a vibration test control system. Compensation methods include pre-pulse, post-pulse, DC removal and high-pass filters.
Pre-stored profiles include Bellcore Z1 & Z2, Bellcore Z3, Bellcore Z4, (Burst) Sine, Triangle, Chirp, Burst Chirp, White Noise (Burst Random), Sine Beat, Sine Beat (multiple frequency), Door Slam (Ford), Decay sine (linear/angular frequency), Sine Burst.
Transient Time History Control
Control Parameters
- Sampling Rate: up to 102.4 kHz
- Time Block Size: 512 to 65,536 points
Test Profiles in Transient Time History
- Waveform Type: Sine, triangle, chirp, white noise, triangle burst, bellcore, sine beat, door slam, decayed sine and sine burst.
- Chirp is a sine wave that sweeps continuously from the start frequency to the end frequency within one block.
- Triangle Bursts conform to commonly used standards for CD player testing in the American and European automotive markets.
- Bellcore 1 & 2, 3, and 4 are the seismic time histories required by the Bellcore test specification. When using the Bellcore signals, the RRS (Required Response Spectrum) of the specification is available as a display to allow direct comparison with the control SRS.
- Sine Beat is interference between two sine wave of slightly different frequencies, perceived as periodic variations whose rate is the difference between the two frequencies.
- Door Slam includes two parameters, acceleration amplitude and decay rate. When the retractor is mounted on a test rig to simulate the vibration effect of vehicle door slamming, and impacted by a force sufficient to activate the vehicle sensor and cause lock up of the retractor, the webbing shall be extractable after one second.
- Decayed Sine is a sine wave whose amplitude is decaying and eventually reaches zero. The damping ratio can be provided by the user. The user can also input the linear or the angular frequency of the decaying sine wave.
Unique Features in Transient Time History (TTH) Control
Vibration Visualization: The EDM Vibration Visualization feature is available in EDM VCS software all test types, including MIMO VCS. This option provides fast and efficient structural model generation and full 3D visualization of the online vibration pattern on the structure under test.
Multiple instances of EDM VCS can run simultaneously on the same computer. Each instance connects a Spider system to run the vibration controller software. All instances must run different tests. This feature provides a central place to control multiple Spider systems and perform vibration tests separately.
Black Box Mode: Operating Without a PC
A supported front-end can operate in Black Box mode which allows it to perform a test without a connected PC. In this mode, a PC is used only to configure the system before the test and then to download the data after the test is complete.
Multi-shaker control (MSC) is a unique feature offered enables users to view and monitor multiple shaker tests from one PC station. Up to 12 controllers can be accessed simultaneously.
Continuous Data Recording
During vibration control, all measurement input and drive signals can continuously record to a Spider-NAS or the internal storage residing in each front-end. Users can view and analyze data files with Crystal Instruments Post Analyzer. The variable sampling rate can be enabled to simultaneously record slow-change signals together with high speed vibration data.
Spider Vibration Testing Hardware
A Spider system can consist of one or more Spider hardware front-ends. The user constructs the system by combining Spider front-ends detected on the same LAN. The software validates and displays hardware attributes of each Spider front-end. The following hardware is supported by EDM VCS software for vibration testing, monitoring, and data acquisition.
- Spider-81/81B Vibration Test Controller
- Spider-80Xi High Channel Vibration Test Controller - Scale up to 512 Channels
- Spider-80X Dynamic Measurement & Vibration Control System
- Spider-80M MIMO Vibration Test Control System
- Spider-80SG General Data Acquisition Device with Strain Measurement
Related Vibration Testing Software Options
- Transient Time History Control (TTH)
- Transient Random Control
- Shock Response Spectrum (SRS) Synthesis & Control for Vibration Testing
- Earthquake Testing Control Vibration Testing
Monitoring Through EDM Cloud
All EDM-VCS vibration tests support status checks through EDM Cloud. With EDM Cloud support, users can set up any VCS test to upload live data or run logs for completed tests to a cloud storage space provided by Crystal Instruments, where data is securely stored in the user’s account.
The EDM Cloud website is located at https://cloud.go-ci.com. Users can access EDM Cloud from anywhere in the world to check the status of past and current tests. A secure login flow ensures the status can only be checked by authorized personnel with proper credentials. Multiple logins for accessing the same Cloud account is available.
|
|
|
|
|
|
|
|
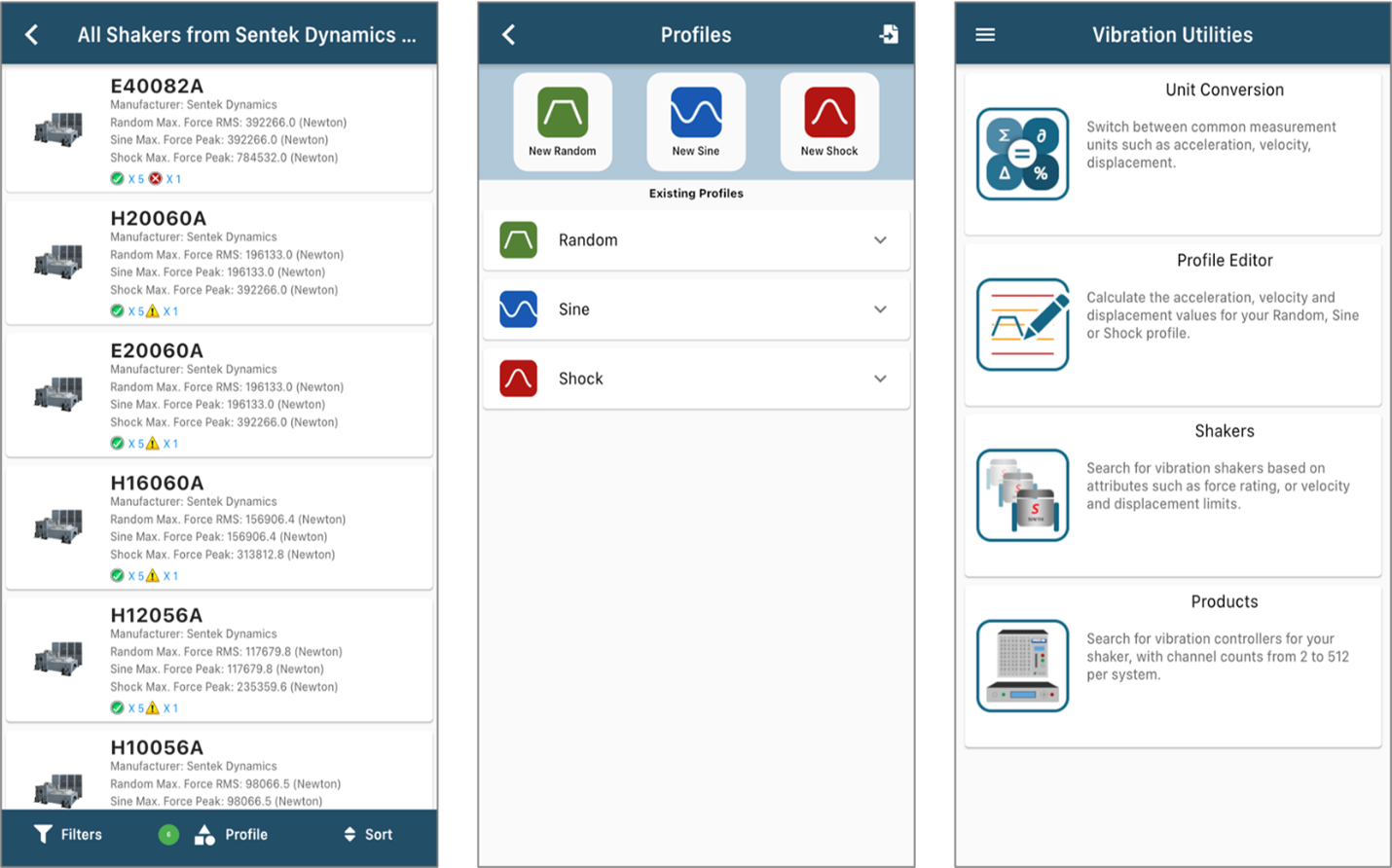
Vibration Utilities App
Crystal Instruments in partnership with our sister shaker company Sentek Dynamics provides users with the Vibration Utilities mobile app on iOS and Android. This app provides calculation features for sizing your vibration profile (Random, Sine or Shock) and searches through our catalogue of shakers and controllers for the best fit.