
A Mathematical View of “Degree of Freedom” in Vibration Test
The term Degree of Freedom (DOF) appears in many areas of engineering. However, the same phrase refers to very different mathematical concepts depending on context.
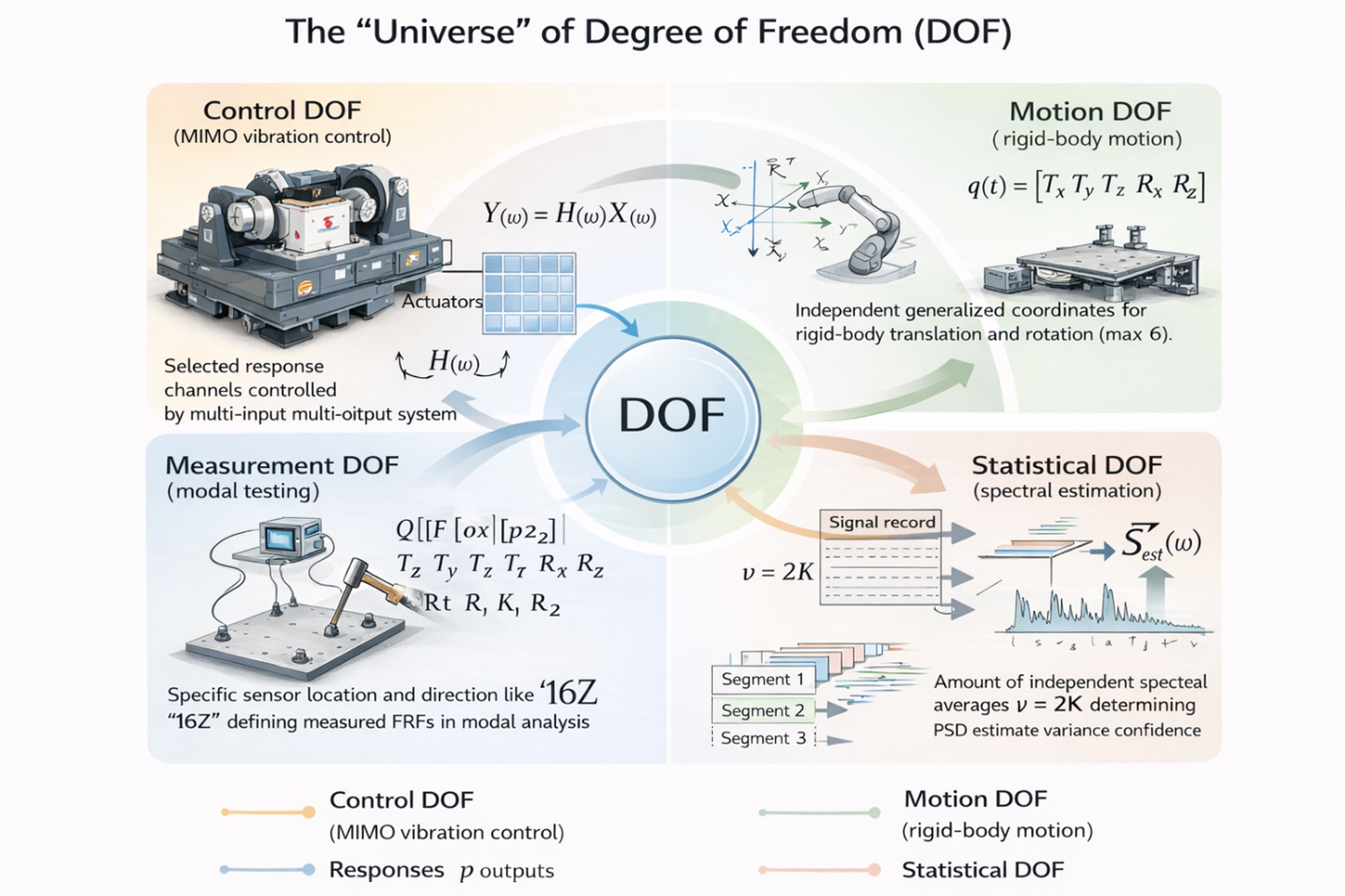
In vibration testing, control systems, modal testing, and spectral estimation, the word DOF may represent:
- Control DOF in MIMO vibration testing
- Rigid-body motion DOF
- Measurement DOF in modal testing
- Statistical DOF in spectral estimation
Although they share the same name, these DOFs arise from completely different mathematical structures.
This article clarifies these definitions and shows how they relate.
1. DOF in MIMO Vibration Control
In multi-shaker vibration testing, the DOF refers to response channels selected for control.
In this context the system is described by a frequency response matrix
where
- \(Y(\omega)\): response vector
- \(X(\omega)\): actuator drive vector
- \(H(\omega)\): frequency response matrix
Dimensions:
where
- \(p\) = number of response DOF
- \(n\) = number of actuators
The system operates across three spaces — motion, actuator, and response spaces.
The vibration control objective is usually defined through the CPSD relation
and actuator spectra are obtained via pseudoinverse
Here the control DOFs are simply the selected rows of the response vector \(Y(\omega)\).
Important observation:
In a large test article there may be hundreds of candidate DOFs, but only a subset are selected for control. The control DOF can be more or less than 6. Concept of 6-DOF does not apply here.
Sensor selection algorithms therefore determine which DOFs are most informative.
Thus in vibration control:
DOF = response channel used in the control matrix.
2. DOF in Rigid-Body Motion Control
In motion systems such as hexapods or hydraulic shaker tables, DOF refers to independent rigid-body motions. People often talk about 6-DOF, and this is where the definition applies.
The motion state vector is
with dimension
where
These correspond to
| DOF | Physical meaning |
|---|---|
| Tx | translation X |
| Ty | translation Y |
| Tz | translation Z |
| Rx | roll |
| Ry | pitch |
| Rz | yaw |
The relationship between actuator motion and rigid-body motion is
and the actuator commands are generated through inverse kinematics
where \(J=F^{+}\).
Here:
DOF = independent generalized coordinates describing rigid-body motion.
3. DOF in Modal Testing
In modal testing, DOF refers to a spatial measurement coordinate.
A modal DOF is defined as: (location, direction)
Example
16Z
meaning
- point 16
- Z direction
The structural response vector becomes
where each element corresponds to a sensor location and orientation.
Typical FRF relation
where
- \(Y\) = measured DOFs
- \(F\) = excitation DOFs
Thus in modal testing
DOF = measurement coordinate on the structure
4. DOF in Spectral Estimation
In signal processing, DOF has a statistical meaning.
For a power spectral density estimate obtained by averaging \(K\) independent segments:
where
\(\nu\) = degrees of freedom.
The PSD estimate follows
Consequences:
Variance of the estimate
More averages → higher DOF → lower variance.
Thus in spectral estimation:
DOF = statistical independence of averaged spectra.
5. Why These DOF Definitions Are Confused
Because all four appear in the same test environment.
Example: multi-shaker vibration test
| Domain | DOF meaning |
|---|---|
| motion control | rigid-body DOF |
| vibration control | response DOF |
| modal test | measurement DOF |
| signal processing | statistical DOF |
So a single experiment may involve
- 6 motion DOF
- 18 control DOF
- 66 measurement DOF
- 200 spectral DOF
All valid simultaneously.
6. Key Takeaway
The phrase “Degree of Freedom” is overloaded.
It may represent:
- Generalized coordinates (motion DOF)
- Sensor coordinates (modal DOF)
- Control channels (MIMO control DOF)
- Statistical averaging (spectral DOF)
Understanding the context is essential.